Bioacústica
Ecolocación en murciélagos: fundamentos, usos y equipos.
Sergio Estrada-Villegas, Raúl Rodríguez-Moreno & Kathrin Barboza-Marquez.
2018
Definición e historia
La ecolocación es un proceso por el cual los murciélagos (Orden Chiroptera) logran obtener información de su entorno, a través de ecos que provienen de sonidos ultrasónicos no audibles para los humanos, generados por ellos y con los cuales pueden ubicarse en el espacio, detectar, clasificar y localizar sus presas (Schnitzler y Kalko 2001).
El uso de sonidos para ubicar objetos fue inicialmente sugerido por Lazzaro Spallanzani en 1793, al replicar los experimentos de Luis Jurine. Utilizando tapones para los oídos descubrieron que los murciélagos colisionaban con obstáculos (Griffin 2001). Ciento cuarenta y cinco años después, GW Pierce desarrolló un sensor capaz de detectar sonidos ultrasónicos que sirvió para que los investigadores Donald Griffin y Robert Galambos, y paralelamente Sven Dijkgraaf, concluyeran que los murciélagos usan este tipo de sonidos para detectar objetos y evitar colisiones (Griffin 2001). Con estos y posteriores ensayos, Donald Griffin acuñó el término ecolocación (o ecolocalización) y confirmó que gracias a la emisión de sonidos ultrasónicos y a la recepción de ecos, los murciélagos pueden capturar insectos al vuelo en condiciones naturales (Griffin et al. 1960).
Características del sonido
Los sonidos ultrasónicos que emiten los murciélagos tienen ciertas propiedades que los hacen propicios para ubicar objetos con detalle, pero al mismo tiempo están sujetos a ciertas complicaciones dependiendo de las condiciones ambientales y del tipo de sonido emitido (Schnitzler et al. 2003). El ultrasonido se destaca por tener una frecuencia alta (ciclos por segundo o Hertzios, Hz), usualmente superior a los 20 kilohertzios (kHz). Por lo general, las frecuencias ultrasónicas usadas por los murciélagos oscilan entre 25 kHz y 100 kHz y pueden ser generadas a través de las narinas o la boca de acuerdo a cada grupo de murciélagos (Kunz y Parson 2009).
Dada la relación inversa entre frecuencia y longitud de onda, los sonidos con mayor frecuencia tienen menor longitud de onda. De tal modo, cuando un objeto tiene un tamaño superior al cociente entre la longitud de onda y la constante, dicho objeto reflejará la onda emitida a manera de eco. Se puede pensar que un murciélago que emite una señal de 30 kHz , es decir de 0,01 m/ciclo, puede detectar objetos mayores a 0,003 m de diámetro. Al incrementar la frecuencia del sonido, la capacidad de detectar objetos de menor tamaño aumenta. Considerando que los insectos pueden tener un tamaño muy pequeño, los sonidos ultrasónicos se convierten en una herramienta ideal para detectar presas pequeñas. No obstante, los sonidos de alta frecuencia tienen un grave inconveniente: tienden a perder intensidad al propagarse por el espacio, y mientras más alta sea la frecuencia menor distancia podrá recorrer el sonido (atenuación; Fig. 1). Esto se complica aún más en ambientes húmedos, debido a que las partículas de agua en el aíre incrementan la atenuación de las ondas sonoras (Neuweiler 1984).

Figura 1. Esquema de la forma en que viaja el sonido de acuerdo a la frecuencia. En frecuencias bajas el sonido es mas difuso, no refleja en objetos pequeños y viaja más lejos, mientras que en frecuencias altas el sonido es más centrado, se refleja en objetos pequeños y no viaja muy lejos (Fuente: Aytekin et al. 2007)
Otra propiedad de los sonidos que emiten los murciélagos es su intensidad. Esta se mide respecto a la amplitud de la onda emitida (decibelios o dB) y es una medida relativa que se compara usualmente con el umbral auditivo de los humanos. Para dar una idea de la intensidad de los sonidos que emiten los murciélagos, sus pulsos ultrasónicos pueden llegar a medir más de 100 dB, en comparación con un trueno que perfectamente alcanza los 110 dB. Son tan intensos, que los murciélagos poseen un músculo especial en el oído medio, para evitar que el sonido maltrate los huesecillos de oído.
Estas propiedades, entre otras, permiten a los murciélagos hacer uso de los ecos que perciben y obtener información vital sobre su entorno y en especial sobre su presa. En el eco se codifica información sobre la distancia a la que se encuentra una presa, gracias al retraso entre la emisión de la señal y la recepción del eco. Asimismo, el murciélago puede calcular la velocidad de la presa gracias a los cambios de frecuencia del eco recibido respecto a la frecuencia del sonido emitido. El eco también contiene información sobre tamaño, textura y ubicación de la presa; el murciélago puede distinguir que los ecos más intensos provienen de insectos de mayor tamaño y con mayor área alar y determinar su ubicación gracias a la diferencia en la potencia del eco al entrar por los dos oídos (Schnitzler y Kalko 2001).
Otro componente importante del sonido son los armónicos, que corresponden a las frecuencias secundarias que acompañan a una frecuencia fundamental. El armónico de una onda es un componente sinusoidal de una señal y su frecuencia es múltiplo de la fundamental. Los murciélagos emiten señales multiarmónicas (Fig. 2) útiles para obtener mayor información del entorno y para detectar, clasificar y localizar sus presas; los armónicos pueden ser usados como un parámetro clave para la identificación de especies, sobre todo a nivel de familia, dependiendo del armónico en el que se encuentre la mayor intensidad del sonido. Por ejemplo, la familia Molossidae presenta la mayor intensidad en el primer armónico y la familia Emballonuridae en el segundo.
¿Qué es el espectrograma, el espectro de poder y el oscilograma?
La información contenida en el sonido que emiten los murciélagos se puede describir visualmente de varias maneras; el espectograma, el espectro de poder y el oscilograma son algunas de las más útiles, y estas permiten la descripción detallada de, cómo mínimo, ocho aspectos espectrales del sonido apropiados para realizar la discriminación entre especies.
Un espectrograma es una figura en un plano cartesiano donde el eje x (abscisa) corresponde al tiempo, usualmente en milisegundos, y el eje y (ordenadas) a la frecuencia, usualmente en kHz (Fenton 2004). De esta manera se puede describir el cambio en la frecuencia del sonido emitido a lo largo del tiempo. Estas representaciones visuales permiten distinguir los tipos de llamadas que usan los murciélagos: frecuencia constante (CF, por sus cifras en ingles), frecuencia cuasi-constante (QCF) y frecuencia modulada (FM) (ver clasificación del sonido). El espectrograma es de suma utilidad ya que además de caracterizar la forma de los sonidos, permite determinar variables como ancho de banda (medida como la diferencia en la frecuencia de inicio y la frecuencia final de la llamada), frecuencia de inicio de la llamada, frecuencia final de la llamada, entre otros parámetros. Sin embargo el número de variables derivadas depende en gran medida del tipo de conversión espectral (transformada rápida de Fourier o análisis de cruces cero) y auditiva (heterodino, división de frecuencia y expansión de tiempo) que se emplee.
El espectro de poder consiste en una representación gráfica de la frecuencia (kHz, en el eje x) y la intensidad (dB, en el eje y). Permite identificar la frecuencia que contiene mayor poder o intensidad y con ello determinar la frecuencia pico del sonido emitido (Fenton 2004).
El oscilograma es una figura que representa la amplitud de las ondas (representadas de manera sinusoidal) en las ordenadas y el tiempo en la abscisa. Con esta figura se puede calcular la duración del sonido (del pulso o de la llamada según el autor) y la duración del intervalo entre las llamadas.
A partir de estas tres figuras, junto con la descripción de los parámetros ya mencionados, se puede realizar una descripción clara de los sonidos emitidos por cada especie de murciélago, y gracias a estas descripciones se pueden realizar bibliotecas que describen los sonidos de ecolocación de muchas especies, especialmente aquellas que consumen insectos al vuelo (Jung et al. 2007).
A continuación presentamos la representación ideal para describir las llamadas típicas de un murciélago, en este caso un Saccopteryx bilineata (Emballonuridae), volando en un sitio abierto (Fig. 2). Adicionalmente, para una descripción clara de los sonidos de cada especie es crucial reportar, como mínimo, 10 parámetros acústicos que describan diferentes aspectos de las llamadas (Tabla 1).

Figura 2. Oscilograma, espectro de poder y espectrograma (esquina inferior derecha) de Saccopteryx bilineata. La escala del eje y en el espectrograma es 20 kHz y del eje x es milisegundos. La manera más precisa de medir la frecuencia pico es usando el espectro de poder, y la duración de la llamada usando el oscilograma. Nótese como se pueden medir el intervalo de pulso tanto en el espectrograma como en el oscilograma. La medición de los componentes de frecuencia modulada y frecuencia cuasi constante CF y QCF se hacen usando el espectrograma.
Tabla 1. Ejemplo de 10 parámetros acústicos medidos en Saccopteryx bilineata. Estos se obtienen analizando el oscilograma, espectro de poder y espectrograma de varias llamadas por grabación y varias grabaciones por individuo capturado. Datos de Jung et al. 2007.
|
Especie |
Saccopteryx bilineata |
|
|
Tipo de llamada |
Primer pulso |
Segundo pulso |
|
Frecuencia pico del componente QCF (kHz) |
44,5 ± 1,3 |
46,8 ± 1,1 |
|
Duración (ms) |
7,5 ± 1,5 |
7,6 ± 1,3 |
|
Intervalo de pulso (ms) |
73 ± 17 |
105 ± 25 |
|
Estructura de la llamada |
FM (arriba)- QCF (arriba)- FM (abajo) |
FM (arriba)- QCF (arriba)- FM (abajo) |
|
Ancho de banda de componente QCF (kHz) |
0,8 ± 0,4 |
0,6 ± 0,3 |
|
Ancho de banda del primer componente FM (kHz) |
1,4 ± 1,1 |
1,0 ± 1,1 |
|
Ancho de banda del segundo componente FM (kHz) |
0,7 ± 0,7 |
0,7 ± 0,7 |
|
Número de llamadas utilizadas |
120 |
120 |
|
Número de individuos grabados |
12 |
|
Clasificación del sonido
Para nuestra discusión, los sonidos se pueden clasificar de acuerdo al tipo de señal emitida, y al uso que da el murciélago a la señal (e.g. aproximación a la presa, captura de la presa, entre otros). Los murciélagos usan una variedad de tipos de señales para obtener información acerca del ambiente, y la presencia, posición, dirección, velocidad e identidad de una presa potencial; estas difieren en amplitud (niveles de presión del sonido), duración, frecuencia absoluta y ancho de banda, principalmente. En general, la estructura varía de acuerdo a la tarea que el murciélago deba ejecutar.
De acuerdo a la estructura de la señal, las llamadas pueden tener elementos únicos o mixtos clasificados en tres tipos básicos de señales, cada una con diferentes propiedades funcionales (Brigham et al. 2004): frecuencia constante (CF), frecuencia cuasi-constante (QCF) y frecuencia modulada (FM).
Señales de frecuencia constante (CF)
En estas llamadas los murciélagos emiten una llamada larga (50 ms o más), sobre una frecuencia constante; usualmente, la mayor energía se concentra en una pequeña porción de la frecuencia de banda estrecha (Fig. 3). Este tipo de llamadas son útiles para la detección de presas, no obstante aquellas llamadas de larga duración pueden ayudar a clasificar presas que aletean en un ambiente de vegetación densa. Este tipo de llamadas no da mucha información sobre localización de las presas.
Señales de frecuencia modulada (FM)
Por lo regular las llamadas de frecuencia modulada empiezan en una frecuencia alta (ej., 70 kHz), y descienden rápidamente en un corto periodo de tiempo (1-5 ms), alcanzando una frecuencia menor (25 kHz). Son llamadas de banda ancha (Fig. 3), que codifican información acerca de la localización (detección) y detalles superficiales de la presa (clasificación); no son adecuadas para detectar blancos de tamaño reducido. Otra ventaja de las señales FM, es que son útiles para clasificar diferentes tipos de vegetación, permitiendo el uso de las plantas como marcas en la orientación espacial.
Señales cuasi-constantes (QCF)
Estos tipos de señales son un punto intermedio entre los dos tipos anteriores; son llamadas de frecuencia modulada de banda estrecha, funcionalmente diferentes de los pulsos de CF, con tasa de cambios menores a 1 kHz/ms (Fig. 3). Son adecuadas para la detección de ecos débiles de pequeños insectos. Además, cuanto más largas en tiempo estas señales de ecolocalización, mejor codifican blancos en movimiento, llevando características modulaciones en la amplitud del eco y la frecuencia (clasificación).
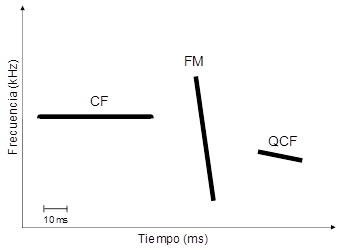
Figura 3. Representación gráfica de los tres tipos básicos de señales que emiten los murciélagos: frecuencia constante (CF), frecuencia modulada (FM) y frecuencia cuasi-constante (QCF).
El uso de espectrogramas permite determinar el comportamiento de algunos grupos de murciélagos, por ejemplo de aquellos que capturan insectos durante el vuelo (murciélagos insectívoros aéreos). Con esa información es posible clasificar diferentes tipos de actividades (e.g. cacería) o cuáles son los sitios de forrajeo más habituales. Una categorización por fases es muy útil cuando se obtienen llamadas de buena calidad y con esta se logran diferenciar diferentes momentos durante la captura de insectos (Kalko 1995, Kalko y Schnitzler 1998): Fase de búsqueda, aproximación y terminal (Fig. 4).
Fase de búsqueda
Se refiere a los sonidos estereotipados que emiten cuando están buscando alimento o desplazándose de un sitio a otro. Éstas llamadas suelen tener un patrón regular que puede ser de una llamada por cada aleteo cuando están volando en el borde y claros de bosque, y puede alternarse hasta una llamada cada tres aleteos cuando están en espacios abiertos (Fig. 4).
Fase de aproximación
Se refiere a cuando el eco que retorna informa al murciélago de una potencial presa, cambiando la tasa de emisión de sus llamadas y donde el tiempo entre una llamada a la siguiente se acorta (Fig. 4).
Fase terminal (feeding buzz en inglés)
Se refiere al momento en el cual el murciélago está próximo a capturar su presa y tanto la frecuencia de las llamadas como el intervalo de pulso disminuyen (Fig. 4).

Figura 4. Espectrograma típico de un murciélago de la familia Molossidae. Se pueden observar a) la fase de búsqueda, b) la fase de aproximación y c) la fase terminal (Fuente: Barboza et al. 2006).
De acuerdo al número de veces que se detectan fases de búsqueda en algún tipo de hábitat y la cantidad de fases terminales que se emiten, se pueden hacer inferencias sobre si existen preferencias por ciertos tipos de hábitats y los horarios en los que están siendo utilizados.
Por otro lado, los murciélagos de la familia Phyllostomidae usan la ecolocación, la visión, el olfato y la memoria espacial para orientarse en el espacio. Un estudio clásico hace referencia a como Phyllostomus hastatus (murciélago nariz de lanza mayor) detecta, identifica y consume frutos de la cucurbitácea Gurania spinulosa. Esta especie de murciélago utiliza llamadas de banda ancha, con múltiples armónicos y con varios componentes de FM de corta duración y baja intensidad, que le permiten la localización del objetivo a través de múltiples llamadas de aproximación durante los vuelos de exploración y decidir si consume o no el fruto utilizando el olfato para determinar si el fruto está maduro (Kalko y Condon 1998; Fig. 5).
De la misma manera que los murciélagos frugívoros detectan los frutos, los nectarívoros usan la ecolocación para detectar flores maduras que ofrecen néctar. Por ejemplo, el estandarte de la flor de la leguminosa Mucuna holtonii refleja el sonido emitido por el murciélago con una amplitud alta, aunque el ángulo de incidencia del sonido sea 30°. Esto le ayuda al murciélago a detectar una flor madura aunque no esté volando directamente hacia ella (von Helversen y von Helversen 1999). Las flores usualmente polinizadas por murciélagos también tienen colores claros, fragancias fuertes y levemente desagradables y están usualmente alejadas del follaje para evitar colisiones con la vegetación.

Figura 5. Llamada de ecolocación de Phyllostomus hastatusdonde se observa el componente de FM y los armónicos (Modificado de Auditory Perception and Social Communication in Greater Spear-Nosed Bats).
La habilidad de los murciélagos frugívoros y nectarívoros (aunque no exclusiva para los murciélagos de estos gremios tróficos para detectar su alimento mediante la ecolocación, depende también la habilidad que tienen para diferenciar la ubicación del fruto, por ejemplo, con respecto a la vegetación circundante. Dado que el eco del fruto esta ‘enmascarado’ dentro del ruido que proviene de la vegetación, se produce una ‘zona de solapamiento del eco’. Si el murciélago no logra diferenciar entre eco y ruido, no podrá localizar al fruto para consumirlo. Para contrarrestar este problema, algunos murciélagos reducen la duración del sonido durante la fase de aproximación para formar una ‘ventana libre de solapamiento’, o una ventana de tiempo en donde el murciélago pueda diferenciar con precisión entre el ruido ambiente y el eco de interés (Schnitzler y Kalko 2001).
La ecolocación también permite a los murciélagos insectívoros comunicarse entre ellos. Algunos estudios muestran que éstos mamíferos pueden discriminar las llamadas de ecolocación de otros individuos de su misma especie, de las de otras especies congéneres que están utilizando el mismo espacio. Incluso algunos individuos pueden ‘espiar’ las llamadas de ecolocación de otros para quitarles su alimento, lo que hace aún más interesante estudiar el comportamiento a través de la ecolocación (Fenton 2003, Dorado Correa et al. 2013).
Métodos de conversión del ultrasonido
Debido a que la mayoría de vocalizaciones emitidas por los murciélagos son ultrasónicas, el objetivo de los métodos de conversión es disminuir la frecuencia de estas señales. Cada técnica de conversión tiene sus ventajas y desventajas, partiendo del hecho de que alteran la estructura de las llamadas de diferente manera. Las técnicas de conversión del sonido más comúnmente usadas son heterodino, división de frecuencia, expansión de tiempo y grabación directa (Brigham et al. 2004; Tabla 2).
Heterodino
Es una de las técnicas más populares y su objetivo es reducir la frecuencia de la llamada del murciélago al mezclarla con dos señales generadas artificialmente. En un detector heterodino hay dos osciladores; la frecuencia del primer oscilador (frecuencia variable) se puede modificar a través de un control de cambios. Un circuito mixto es usado para multiplicar la frecuencia del primer oscilador con la señal ultrasónica generada por el murciélago. Esto resulta en una señal de dos componentes de frecuencia. El componente de frecuencia mayor es eliminado cuando la señal pasa a través de un filtro; el componente de frecuencia resultante es combinado con la frecuencia de un oscilador de frecuencia constante, produciendo una segunda señal con dos picos de frecuencia. Un último filtro remueve las señales de alta frecuencia y presenta al usuario la versión audible. Con esta técnica sólo se puede transformar un estrecho rango de la frecuencia. Por ejemplo, si el rango de frecuencia audible es de 10 kHz, al ajustar la frecuencia del oscilador de frecuencia variable a 30 kHz, sólo se podrán escuchar frecuencias entre 25 kHz y 35 kHz.
División de frecuencia
Esta técnica reduce la frecuencia de una señal disminuyendo el número de ciclos que contiene. Un sistema de división de frecuencia cuenta el número de veces que la onda entrante cruza el nivel de voltaje cero. Después, un circuito reduce la frecuencia de la señal entrante, permitiendo sólo a cada cierto número de ciclos pasar a través de este haciendo audible el sonido. Por ejemplo, un sonido de 30 kHz está compuesto de 30 000 ciclos/segundo. Si el circuito de división de frecuencia es ajustado en 10x, es decir permitiendo el paso de sólo un ciclo cada 10 ciclos, la señal resultante contendrá sólo 3 000 ciclos, reduciendo la frecuencia a 3 kHz. Los sonidos pueden ser visualizados a través del análisis de cruces-cero.
Expansión de tiempo
Al incrementar artificialmente la duración de un sonido, se reducirá la frecuencia de la señal ultrasónica. Por ejemplo, con un factor de expansión de 10x, una señal de 40 kHz que dura 10 ms (milisegundos) puede ser convertida en una llamada de 4 kHz doblando su duración a 100 ms. En esta técnica el número de ondas en la llamada original no se modifica. El sonido audible es grabado en la memoria interna del dispositivo de detección ultrasónica, hasta que sea reproducido y grabado en una grabadora convencional. Los sonidos pueden ser visualizados a través del análisis de espectro completo y usando una transformación de Fourier.
Grabación directa
Con este método las señales ultrasónicas pueden ser grabadas directamente a unos dispositivos sin conversiones previas. En el mercado existen dispositivos con tarjetas de sonidos de alta velocidad, capaces de registrar y grabar señales de alta frecuencia en tiempo real. Los sonidos pueden ser visualizados a través del análisis de espectro completo y usando una transformación de Fourier.
Tabla 2. Ventajas y desventajas de los métodos de conversión de sonidos ultrasónicos.
|
Ventajas |
Desventajas |
|
Heterodino |
|
|
- Detectores económicos. - Alta sensibilidad (buen proporción de señal-ruido). - Fuerte amplificación de la señal. - Análisis en tiempo real y continuo. - Con algo de experiencia es posible identificar algunas especies. |
-Es una técnica de banda estrecha. - Se pierde parte de la estructura de la llamada (no preserva la amplitud, duración, la frecuencia máxima y mínima, y los armónicos de la señal original). - No permite análisis a posteriori de las grabaciones. |
|
División de frecuencia |
|
|
- Es una técnica de banda ancha. - Análisis en tiempo real y continuo. - Permite análisis a posteriori de las grabaciones. - El tamaño de los archivos de sonido generados es pequeño (4-8 kilobits).
|
- Llamadas muy cortas se pueden reducir hasta el punto de no contener información útil. -Dependiendo del dispositivo, durante el proceso de conversión se puede perder información de la llamada (e.g. amplitud y frecuencia con mayor energía). -Solo se muestra el armónico más fuerte. |
|
Expansión de tiempo |
|
|
- Técnica de banda ancha. - A pesar del proceso de conversión, la señal resultante contiene la misma información que la señal original. - Permite análisis a posteriori de las grabaciones. |
- La conversión no se realiza en tiempo real, de modo que el muestreo no puede ser realizado de manera continua. - El tamaño de los archivos grabados por lo regular es grande (.WAV, 500kb - 5MB). |
|
Grabación directa |
|
|
- Técnica de banda ancha. - No hay conversión de los sonidos. - Los sonidos son grabados con la máxima resolución posible. - La conversión del sonido puede ser realizada en tiempo real y continuo. |
- Es un método de conversión costoso. - Por lo regular requiere la compra adicional de un micrófono. - Tamaño de los archivos grabados por lo regular es grande (.WAV, 500kb - 5MB). |
Equipos
Los detectores ultrasónicos son dispositivos electrónicos que permiten detectar la presencia de un murciélago con cierta exactitud y resolución a partir del registro y conversión de las señales ultrasónicas que estos emiten (Tabla 3). Existen numerosos tipos de detectores de ultrasonidos disponibles en el mercado, no obstante cada uno varía de acuerdo a sus virtudes y limitaciones. A continuación analizaremos la importancia de algunas características asociadas al dispositivo, tales como tipo de micrófono, rango de detección, direccionalidad del micrófono y ancho de la frecuencia de detección.
La función del micrófono en un detector de ultrasonidos es hacer audibles los sonidos mayores a 15 kHz, y es quizás uno de los componentes más importantes del detector. La selección de un micrófono frecuentemente no depende del investigador, ya que la mayoría de detectores tienen un micrófono incorporado por defecto. Para aplicaciones bioacústicas los tipos más comunes son los piezoeléctricos, capacitancia y Electret (Kunz y Parsons 2009).
Los micrófonos piezoeléctricos están construidos de materiales piezoeléctricos (e.g. cuarzo) que generan un potencial eléctrico en respuesta a un estrés mecánico. Son transductores económicos, eficientes y fuertes; no obstante, los cristales piezoeléctricos sólo pueden ser ajustados en respuesta a un estrecho ancho de banda.
Los micrófonos de capacitancia están hechos de una placa trasera de metal separada de una delgada membrana de plástico metalizado, las cuales forman el capacitador o condensador. Son micrófonos unidireccionales, con alta sensibilidad y robustez pero pueden ser afectados por la humedad. Estos micrófonos generan un alto nivel de ruido, producto del voltaje que requiere para la polarización de las membranas.
Los micrófonos Electret tiene un diseño similar al micrófono de capacitancia, no obstante no requieren un voltaje para la polarización de las membrana, por lo cual no genera ruido. Estos son fuertes y relativamente no afectados por cambios en la humedad, temperatura y viento. Una propiedad particular de estos últimos es que son omnidireccionales, es decir sensibles al sonido desde cualquier dirección.
El rango de detección hace referencia al área muestreada por el detector, entre mayor sea esta área, mayor será el número de registros de señales de murciélagos que se puedan obtener (Brigham et al. 2004). El rango de detección depende del tipo y orientación de la llamada emitida por el murciélago, el hábitat de registro, las condiciones atmosféricas y la sensibilidad o condiciones del micrófono. Las llamadas de murciélagos intensas (amplitud alta) pueden ser detectadas a grandes distancias (>10 m) en contraste con las llamadas poco intensas (<1 m). Por otro lado, murciélagos que forrajean cerca de la vegetación usan por lo regular algunos elementos de llamadas de frecuencia modulada, los que pueden ser detectados a un rango corto.
La direccionalidad es una característica del micrófono más que del dispositivo de detección mismo (Brigham et al. 2004). Esta característica indica los cambios en la sensibilidad del micrófono de acuerdo con la dirección de origen del sonido, por ejemplo un micrófono unidireccional tendrá una mayor sensibilidad cuando los sonidos proceden de una sola dirección. Los micrófonos unidireccionales tienen un mayor rango de detección y son más útiles en muestreos activos, en comparación con los micrófonos omnidireccionales, que con un rango menor de detección son usualmente útiles en muestreos pasivos.
Los dispositivos que tienen sistemas de conversión de sonidos de banda ancha (e.g. división de frecuencia y expansión de tiempo) permiten detectar simultáneamente especies de murciélagos que usan diferentes frecuencias. Por otro lado, aquellos detectores que cubren sólo una pequeña porción del rango ultrasónico, es decir de banda estrecha, subestiman la presencia de algunas especies. Los detectores de banda ancha son útiles para muestreos pasivos que buscan caracterizar el mayor número de murciélagos en una zona; por otro lado los detectores de banda estrecha tienen enormes ventajas en la detección selectiva murciélagos.
A continuación se presentan las principales características de algunos detectores más populares en el mercado:
Tabla 3. Resumen de algunas características de detectores ultrasónicos disponibles en el mercado. Para acceder a la pagina web del fabricante, dar click sobre el nombre del dispositivo.
|
|
 |
 |
 |
 |
 |
 |
 |
 |
|
Fabricante |
Wildlife Acoustic |
PetterssonElektronik AB |
Elekon AG |
PetterssonElektronik AB |
Avisoft |
PetterssonElektronik AB |
Elekon SG |
EcoObs |
|
Metodo de conversión (audible) |
HE, TE, DF |
HE, TE, DF |
RD (TE, HE) |
HE, TE |
RD (TE) |
HE |
HE |
TE |
|
Tasa de muestreo (kHz) |
256 o 384 |
32 - 768 |
312.5 |
307 |
50 – 1,000 |
NA |
NA |
500 |
|
Tipo de microfono |
NE |
Capacitancia |
Electret |
Electret |
Capacitancia o Electret |
Capacitancia, Electret |
Electret |
Electret |
|
Microfono reemplazable |
Si |
Si |
Si |
No |
Si |
No |
Si |
Si |
|
Almacenamiento |
Interno (SDHC) |
Interno (CF) |
Interno (SDHC) |
Externo (Grabadora) |
Externo (Grabadora) |
Externo (Grabadora) |
No |
Interno (SDHC) |
|
Registro automatizado |
Si |
Si |
Si |
No |
Si |
No |
No |
Si |
|
Analisis en tiempo real |
Si |
No |
No |
No |
Si** |
No |
No |
No |
|
Herramientas post-procesamiento (USD)* |
Kaleidoscope (400-1,500) |
BatSound (591) |
BatScope o BatExplorer (Gratis) |
BatSound (603) |
Avisoft-SASLab Pro (1,500 - 2,200) |
- |
- |
Ninguno |
|
Portabilidad |
+++ |
+++ |
+++ |
++ |
++ |
+++ |
+++ |
++ |
|
Adicionales |
GPS (opcional) |
GPS |
GPS y sensor de temperatura |
- |
GPS (opcional) |
- |
- |
GPS (opcional) |
|
Costo (USD)* |
999.00 |
5,875… |
2,029.00 |
1,554.00 |
6,643.00 |
250.00 |
246.00 |
3,188.00 |
*Valores consultados el 13 de Octubre/2013; ** Requiere un dispositivo de visualización (PC o tableta).
Consideraciones importantes al momento de elegir una grabadora.
Aunque en la actualidad los detectores ultrasónicos traen de fabrica tarjetas de memoria que permiten hacer las grabaciones de los sonidos, algunos como el Petterson D240X, que todavía sigue siendo muy utilizado, necesitan de una grabadora para poder hacer los registros.
Existen muchos grabadores digitales en el mercado, pero es importante tomar en cuenta ciertos detalles al momento de elegir alguna:
- Grabación directa en formato .WAV, algunos modelos graban en su propio formato y no se puede escoger el formato deseado, estos NO son recomendables porque al no grabar directo en .WAV se pierde calidad en la grabación.
- Que cuenten con memoria de suficiente capacidad, limitando el tiempo de muestreo. En comparación con otros tipos de archivos (e.g. mp3), los archivos .WAV ocupan más espacio.
- El tipo de baterías que se utilizan y el tiempo en horas de grabación real que pueden durar.
Finalmente otro aspecto a tener en cuenta es el cable que conecta el grabador con el detector. Hay que asegurarse que tenga las entradas correctas y tener cables de repuesto, ya que es uno de los accesorios que se malogra con mayor facilidad y puede perjudicarnos al momento de realizar los registros acústicos.
Llamadas de referencia y librería acústica.
Un aspecto fundamental que se debe tener en cuenta al momento de hacer grabaciones y/o monitoreos acústicos, es capturar la mayor cantidad de especies de murciélagos para registrar llamadas de referencia. Gracias a estas llamadas se pueden comparar las grabaciones realizadas en vuelo libre con las previamente grabadas de los murciélagos capturados y de esta manera facilitar la identificación de las especies y la construcción de librerías acústicas.
Es importante recalcar que las llamadas de referencia deben hacerse en CADA localidad de estudio, puesto que pueden existir variaciones en las llamadas según el tipo de hábitat y la zona (dialectos locales) que potencialmente limitan la identificación de especies en vuelo libre.
Con este fin las redes de neblina se deben ubicar en lugares estratégicos para aumentar las probabilidades de captura de las especies de interés. Para murciélagos insectívoros, las salidas de refugios, cuerpos de agua, senderos con vegetación circundante, bordes y claros de bosque, son lugares apropiados donde se puede tener un buen éxito de captura. Una vez identificados los individuos y al momento de liberarlos, se pueden hacer las llamadas de referencia. Para esto hay varios métodos que se pueden utilizar:
Línea de vuelo (zipline flight en inglés)
Se amarra el murciélago a un hilo de 3 a 5 m de longitud, con un nudo corredizo ya sea en el cuello o una pata, con muchísimo cuidado tratando de no lastimar al animal. El otro extremo del hilo se sujeta a un aro que permita que el hilo corra libremente a lo largo de una soga más gruesa y mucho más larga (30 – 50 m), que está bien amarrada y tensa en sus extremos. Se suelta al murciélago para que pueda volar y se ubican los detectores a lo largo de la línea principal, con el micrófono dirigido hasta el murciélago para poder obtener los registros (Fig. 6).
Una desventaja de este método es que al estar sometidos a cierto estrés algunas especies de murciélagos no emiten sus llamadas características, pero igualmente se puede lograr una idea sobre los componentes que pueden utilizar y la forma de la llamada. Otras dificultades son que los murciélagos pueden morder el hilo y cortarlo para escaparse, o que el hilo puede enredarse en las ramas o en otros obstáculos, por lo que es fundamental buscar un espacio abierto que no dificulte la utilización de este método.

Figura 6. Esquema de la línea de vuelo utilizada para el registro de las llamadas de referencia de murciélagos insectívoros.
Grabaciones a la salida de los refugios
Es una excelente opción para obtener no sólo llamadas características, sino también de comportamiento. Para esto es importante hacer capturas previas que permitan determinar las especies que habitan en el refugio, y si es posible la hora y los lugares de salida para tener el equipo listo a la hora y en el lugar adecuado (Fig. 7). Una de las posibles desventajas para realizar este tipo de grabaciones es la cantidad de individuos que puede registrarse saliendo al mismo tiempo, lo cual podría dificultar el análisis de las llamadas.

Figura 7. Registro de llamadas de referencia a la salida de refugios identificados previamente.
Grabaciones en cajas de vuelo
Esta metodología consiste en construir un armazón tipo cuarto, con paredes de algún material muy delgado, como tela de mosquitero, para que el sonido no rebote y las grabaciones tengan la menor cantidad posible de eco. Las cajas de vuelo deben ser de tamaño suficientemente grande como para que el murciélago pueda desplazarse libremente, emitiendo llamadas características que puedan ser registradas y utilizadas para la identificación de la especie en vuelo libre (Fig. 8). La idea principal de esta técnica consiste en que se puedan obtener llamadas de muy buena calidad y muchas secuencias que permitan distinguir alguna variabilidad que pueda ser útil al momento de la identificación.
La desventaja principal de este método es el espacio que se necesita y las limitaciones logísticas para armar la caja de vuelo. Sin embargo se pueden aprovechar algunos espacios, como cabañas, que tengan ventanas amplias para evitar el rebote del sonido en el micrófono, o mariposarios en desuso.

Figura 8. Esquema de una caja de vuelo construida para el registro de las llamadas de referencia de los murciélagos capturados ya sea en redes de neblina o en sus refugios.
Grabaciones al momento de liberar a los individuos (Hand-release en inglés)
Esta es una de las técnicas más recomendadas y fáciles de hacer, siempre y cuando se encuentre un lugar propicio para obtener buenos registros acústicos.
Lo ideal es liberar a los murciélagos en un lugar alto, para que puedan impulsarse y donde exista un espacio abierto y un área de bosque. Se debe contar con una persona que se posicione en el lugar alto en medio del espacio abierto, que es quien liberará a los murciélagos, y personas con detectores acústicos que se ubicarán en la parte baja con el área de bosque por detrás (Fig. 9). Se pueden hacer variaciones tratando de contar como mínimo con dos personas, una que libere al murciélago y la otra que se coloque justo al frente para realizar la grabación. En caso de no haber un lugar alto, se recomienda hacerlo en medio de un claro de bosque donde el que libera al murciélago se posicione justo en medio, y quienes hagan el registro acústico se coloquen justo al frente, con el área boscosa por detrás de ellos. Se recomienda que los sitios usados para esta técnica sean acordes al hábitat usado por la especie de interés. Por ejemplo, para obtener la llamada de referencia de un murciélago que frecuenta zonas abiertas como potreros, se recomienda que la llamada de referencia sea registrada en un zona abierta. No obstante, si se desean obtener variaciones de la llamada de acuerdo al tipo de hábitat, es recomendable repetir el método en distintos ambientes.

Figura 9.Esquema de un espacio ideal en el bosque para el registro de llamadas de referencia al momento de liberar a los individuos.
Algunas desventajas de este método son encontrar un momento en el que no haya actividad de otros individuos, para no confundir los registros de aquellos murciélagos que vuelen en dirección contraria al lugar donde estén posicionados los detectores, o que no se registre ninguna llamada.
Esta es un metodología que puede ser modificada de acuerdo a las limitaciones logísticas del lugar y al número de personas trabajando. Por ejemplo, si sólo hay una persona, se puede buscar un árbol alto en un borde o claro de bosque, que no tenga muchas ramas y dejar que el murciélago suba mientras la persona se posiciona al frente del árbol y esté lista para grabar cuando el murciélago alce vuelo (Guillén-Servent, comunicación personal)..
Consideraciones importantes
Cualquiera sea la metodología empleada para el registro de las llamadas de referencia, es importante tomar en cuenta las siguientes consideraciones:
- Tener una hoja de registro de datos donde se tenga anotada la especie, el código de captura, sexo y edad de los individuos, método de grabación y número de archivo registrado por cada detector utilizado (Figura 10 y 11).
- Tomar en cuenta que las grabaciones deben hacerse dentro de la hora de actividad de los murciélagos para evitar que entren en torpor.
- Tener cuidado con los depredadores que pueden estar rondando.
Conclusiones
El uso de la ecolocación para el estudio de los murciélagos es una herramienta fundamental que está siendo cada vez más accesible para los investigadores latinoamericanos. Con un conocimiento básico de las propiedades del sonido y una revisión literaria de los estudios más pertinentes sobre el tema se pueden comenzar numerosos estudios de calidad que contribuyan a la creación de librerías de sonido de poblaciones particulares, estudios de las relaciones entre especies de murciélagos, de los murciélagos con sus fuentes de alimento, y al entendimiento de la distribución y abundancia de los insectívoros a escala del paisaje o a escalas biogeográficas. Los diferentes tipos de equipos y micrófonos disponibles en el mercado ofrecen un amplio rango de alternativas dependiendo de las preguntas que se deseen responder y de las limitantes logísticas y presupuestarias. Con este tipo de avances, se espera que el número de estudios que usen herramientas bioacústicas incremente y que se ahonde en el conocimiento de la quiropterofauna de nuestro continente.

Figura 10. Formato de registro de datos de captura de murciélagos.

Figura 11. Formato de registro de datos de llamadas de referencia de murciélagos con Batlogger. Este campo puede ser modificado fácilmente dependiendo del tipo y la cantidad de equipos se usen. Por ejemplo, puede ser Petterson 1, 2, 3 y los ajustes usados para realizar la grabación.
Referencias
Aytekin, M., C. F. Moss, and J. Z. Simon. 2007. Sound localization by echolocating bats: Are auditory signals enough? The Journal of the Acoustical Society of America 122:2980-2980.
Barboza, K., L. F. Aguirre, and E. K. V. Kalko. 2006. Protocolo estandarizado para obtener el registro y el análisis de llamadas emitidas por murciélagos. Revista de Ciencia y Tecnología, Centro de Biodiversidad y Genética:9-13.
Brigham, R. M., E. K. V. Kalko, G. Jones, S. Parsons, and H. Limpens. 2004. Bat Echolocation Research: tools, techniques and analysis. Bat Conservation International. National Fish and Wildlife Foundation. .
Dorado Correa, A. M., H. R. Goerlitz, and B. M. Siemers. 2013. Interspecific acoustic recognition in two European bat communities. Frontiers in physiology 4:1-8.
Fenton, M. B. 2003. Eavesdropping on the echolocation and social calls of bats. Mammal Review 33:193-204.
Fenton, M. B. 2004. Reporting: essential information and analysis. Pages 133–140 in M. Brigham, E. K. V. Kalko, G. Jones, S. Parsons, and H. J. G. A. Limpens, editors. Bat echolocation research: tools, techniques and analysis. Bat Conservation International, Austin.
Griffin, D. R. 2001. Return to the magic well: Echolocation behavior of bats and responses of insect prey. BioScience 51:555-556.
Griffin, D. R., F. A. Webster, and C. R. Michael. 1960. The echolocation of flying insects by bats. Animal Behaviour 3:141-154.
Jung, K., E. K. V. Kalko, and O. v. Helversen. 2007. Echolocation calls in Central American emballonurid bats: signal design and call frequency alternation. Journal of Zoology 272:125-137.
Kalko, E. K. V. 1995. Insect pursuit, prey capture and echolocation in pipistrelle bats (Microchiroptera). Animal Behaviour 50:861-880.
Kalko, E. K. V. and M. A. Condon. 1998. Echolocation, olfaction and fruit display: How bats find fruit of flagellichorous cucurbits. Functional Ecology 12:364-372.
Kalko, E. K. V. and H.-U. Schnitzler. 1998. How echolocating bats approach and acquire food. Pages 197-204 in T. H. Kunz and P. A. Racey, editors. Bat Biology and Conservation. Smithsonian Institution Press, Washington.
Kunz, T. H. and L. Parson. 2009. Ecological and behavioral methods for the study of bats. 2nd edition. Johns Hopkins University Press, Baltimore.
Neuweiler, G. 1984. Auditory basis of echolocation in bats. Pages 115-141 in L. Bolis, R. D. Keynes, and S. H. P. Maddrell, editors. Comparative Physiology of Sensory Systems. Cambridge University Press, Cambridge.
Schnitzler, H.-U. and E. K. V. Kalko. 2001. Echolocation by Insect-Eating Bats. BioScience 51:557-569.
Schnitzler, H.-U., C. F. Moss, and A. Denzinger. 2003. From spatial orientation to food acquisition in echolocating bats. Trends in Ecology and Evolution 18:386-394.
von Helversen, D. and O. von Helversen. 1999. Acoustic guide in bat-pollinated flower. Nature 398:759-760.
Forma de citar esta página: Estrada-Villegas, S., Rodríguez, R. y Barboza, K. 2018. Ecolocación: fundamentos, usos y equipos (Disponible en: <http://www.relcomlatinoamerica.net/investigación/bioacústica.html>; último ingreso FECHA)
Murciélagos en viviendas
Participa en el estudio de convivencia con murciélagos desarrollado por miembros del PCM El Salvador y PCM Chile.
Proyectos de Investigación
Murciélagos y enfermedades emergentes
Conoce más sobre la problemática de enfermedades emergentes asociadas a murciélagos.